|最新成果丨张守祥教授:综采巡检机器人关键技术研究( 二 )
研究背景
目前 , 综采工作面智能化处于初级阶段 。 受制于地质条件的复杂性 , 已实现自动化的综采工作面生产现场 , 仍需要“有人巡视” 进行人工观察和干预 , 未实现完全无人化 。更高阶段的智能化目标是自适应、自主无人化开采 , 需要在综采工作面敷设大量的传感监测、控制和通信等设备 。综采工作面是煤炭安全生产的中心场所 , 采煤机、刮板输送机和液压支架是综采“三机” 开采装备 , “三机” 装备的集控、远控和自动控制是综采工作面智能化的基础条件 , 现有自动化监控技术和设备不能做到全方位、无缝覆盖和实时监控综采生产采支运全过程 , 主要原因在于:①支架上固定摄像头监视工作面存在死角盲区 , 生产时对采煤机滚筒的跟踪存在视角偏离、不同监控相机切换不及时;②待开采煤层赋存情况不清楚 , 煤机记忆截割无法适应地质条件的变化 , 不能根据煤层起伏决定上调、下调或维持煤机滚筒高度 , 仍然依赖于人工现场观察 , 需要提前探测好煤层赋存情况或随采随探;③工作面生产时出现大块煤 , 可能会拥堵采煤机过煤口或转载机入料口 , 需要及时探测和处理 。
基于此 , 研发了一种自主或跟随采煤机行走的巡检机器人 , 实时监控采煤机滚筒、探测待采煤层信息、机械臂操作的监控和执行装置 , 代替人工巡视和操作 , 做到工作面生产工作面无人 。根据国家、行业对煤炭开采机器人的要求 , 借鉴地面机器人的成熟和先进的理论、技术 , 开展煤炭开采机器人研制和智能化综采工作面的工程应用 。
内容概要
1 智能开采对综采机器人的需求
1.1 国家支持煤炭开采智能化应用机器人技术
国家宏观政策对煤炭开采应用机器人技术提出了要求 。 原国家煤矿安全监察局于2019年1月发布了《煤矿机器人重点研发目录》 , 分5类共38种煤矿机器人 , 其中的安控类明确提出了“工作面巡检机器人” 。 2020年国家八部委印发《关于加快煤矿智能化发展的指导意见》 , 为煤矿综采机器人的体系建设、技术验证平台与系统建设、典型应用示范等提出了国家政策指导方针 。
1.2 综采巡检机器人发展中的问题
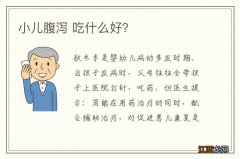
1.2.1 巡检柔性轨道
1.2.2 移动通信无缝漫游
1.2.3 控制和操作功能
图1 巡检柔性轨道接缝处
1.3 综采工作面巡检机器人研发现状
由于煤炭智能开采的特殊性 , 综采工作面应用机器人技术需要解决在柔性轨道上的精确定位、移动、无线通信和快速漫游等技术难题 , 扫除机器人技术在恶劣环境下的技术障碍 , 推动机器人技术在智能开采中的推广应用 。
2 综采巡检机器人技术体系
综采机器人的技术研究 , 需要从顶层设计构建机器人技术体系 , 在高精度传感器、零切换快速漫游和低延时高可靠控制等关键核心技术上取得突破 , 以指导机器人的研制和应用工作 。
2.1 巡检机器人技术体系
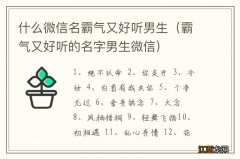
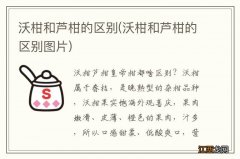
从整体结构、控制、驱动行走、供电、移动通信、机械臂和协同控制等方面 , 建立综采巡检机器人技术体系 , 如图2所示 。 根据智能开采对综采工作面的实时监控需求 , 将巡检机器人系统分为轨道、驱动平台、机载装置、移动通信、供电和上位机平台几部分 , 如图3所示 。
2.2 综采巡检机器人技术研究重点方向
3 综采巡检机器人关键技术
图 2 综采巡检机器人技术体系
图 3 工作面巡检机器人组成
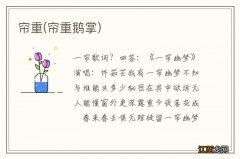
3.1 跨式柔性轨道技术
图4 无缝柔性轨道组成
3.2 行走控制技术
图5 巡检机器人行走控制软件流程
相关经验推荐







- 红米手机|红米K40认输!小米最香千元机确定:67W+旗舰芯片,顶配跌破1800
- 第三方支付|最近各地开始陆续升温了,感觉整个手机又开始发烫了
- 小米科技|降价到千元,曲面屏+3200万像素自拍,小米最好看手机香不香
- 三星Galaxy|目前最值得买的三款手机,堪称三大系统代表之作,你更喜欢哪款?
- 工业机器人|DDR5内存怎么装最划算?装机答疑,最具性价比的装机方案分享
- 小米科技|最美小米手机新款曝光:超窄边单孔曲面屏+骁龙7系芯
- 小米科技|iPhone14 Pro系列说好的升级没了,网友:苹果你最好别这么做!
- ssd|传夏普VR屏月出货100万个,为Quest 2最大显示屏供应商
- 红米手机|Redmi史上最贵!K50系列用上三星2K直屏:挑战顶级直屏
- gen.g战队|谁是2022最强旗舰芯,骁龙8gen1和天玑9000,如何抉择?