机器人|RobotStudio软件:ABB机器人输送带跟踪虚拟仿真操作方法

文章图片
文章图片
文章图片
文章图片
文章图片
文章图片
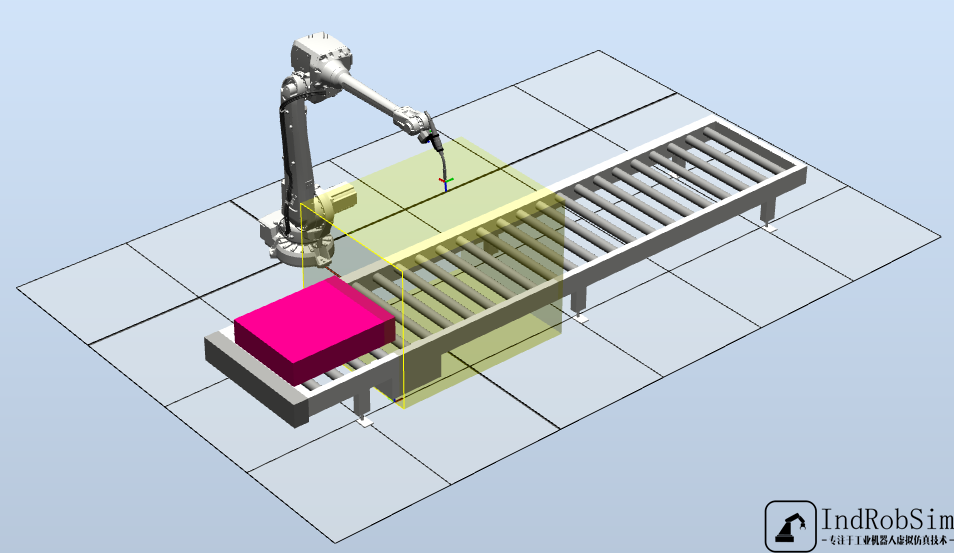
概述?上一期介绍了如何在RobotStudio软件中创建输送带 , 并实现输送带自动输送物料 。 本期将在上一期创建的虚拟仿真环境中添加ABB机器人 , 用来实现机器人对输送带上的物料进行跟踪 , 这一功能也被称为机器人输送带跟踪 。
机器人系统创建?从RobotStudio软件自带的机器人模型库中添加一台机器人 , 然后从软件设备模型库中添加工具模型AW_Gun_PSF_25 , 并将工具安装到机器人上 。
将输送带位置调整到机器人可达范围内 , 使得工件在输送带上传送时机器人能够在工件上完成加工任务 。
创建好的机器人输送带跟踪简易工作站如下图所示 。
从布局生成机器人系统 , 系统选项参数中除了常规的机器人系统语言与I/O信号网络以外 , 还要选择输送带跟踪功能选项“606-1 Conveyor Tracking” , 同时系统会要求额外选择“1552-1 Tracking Unit Interface”或“Conveyor Tracking on PIB” , 任意选择其中一个选项即可 , 本例选择“Conveyor Tracking on PIB” 。
【机器人|RobotStudio软件:ABB机器人输送带跟踪虚拟仿真操作方法】
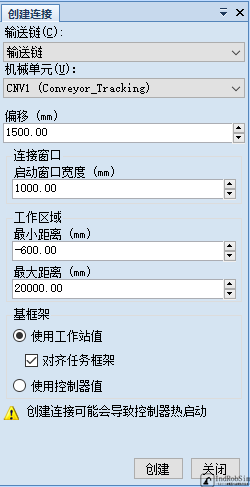
输送带配置?在“建模”菜单栏的“机械”命令组中 , 点击“创建连接”命令按钮 , 弹出创建连接对话框 。
在此对话框中可以配置机器人控制器与输送带之间的跟踪连接关系 , 各个属性参数含义如下:
输送链:选择要连接机器人控制器的输送链 。
机械单元:选择要连接输送链的机器人控制器 。
偏移:设置输送带机械装置(模型)基准坐标系位置与输送带跟踪基准坐标系位置(连接窗口)的偏移值 , 机器人将在工件运行到输送带基准坐标系位置处时开始执行跟踪任务 。
启动窗口宽度:设置以输送带跟踪基准坐标系为起始位置沿着输送带输送方向的偏移值 , 这个偏移距离所在位置与输送带跟踪基准坐标系所在位置将形成一个区域(跟踪窗口) , 机器人将在这个区域内完成输送带跟踪任务 。
工作区域:设置在跟踪窗口中机器人能够顺利完成工件加工的工作区域 , 通过设置“最小距离”与“最大距离”来控制区域范围大小 。
基框架:设置输送带跟踪基准坐标系坐标值更新方式 , 包含“使用工作站值”与“使用控制器值”两种方式 , 在选择“使用工作站值”时 , 可以选择“对齐任务框架” , 以使RAPID中的任务坐标系与连接的工作站中的基准坐标系对齐 。
根据需要设置连接参数 , 设置完成后点击“创建”按钮 。
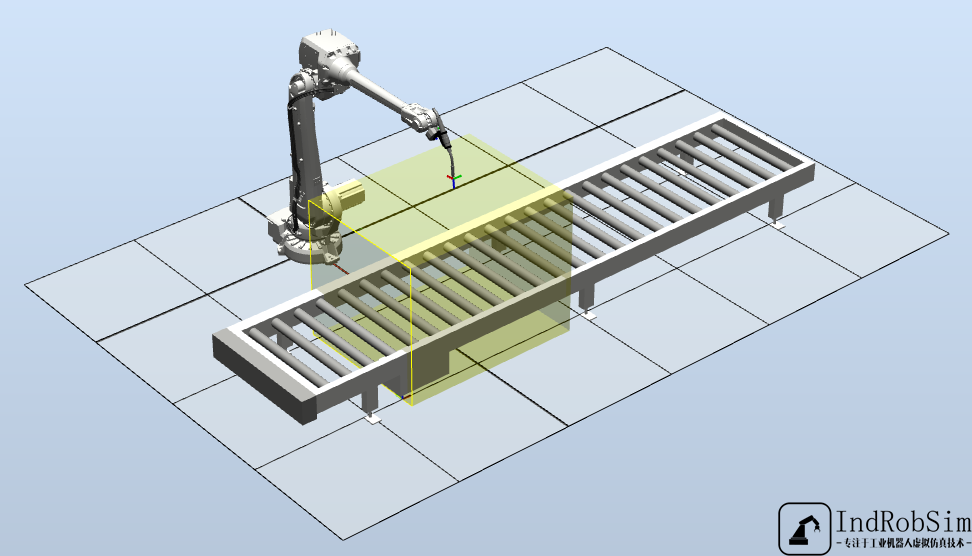
创建机器人控制器与输送带跟踪连接时会对机器人控制器进行热启动 , 启动完成后设置的输送带跟踪参数才会生效 。 这时 , 在软件工作区的输送带上会出现一个淡黄色的长方体 , 这个长方体就是机器人输送带的跟踪窗口 。
相关经验推荐













- 酷睿处理器|11/12代酷睿+Win11封杀4K蓝光碟 播放软件厂商回应:无能为力
- 软件|10款职场宝藏APP,让你的工作效率提升至少10倍
- 软件|这些相亲软件也很宝藏!
- 机器人|预算紧张补上骁龙8系旗舰,这款2K档新机担值得考虑
- 软件|手机上必备的悬浮窗功能,便捷又贴心,为什么大家都不怎么用?
- 工业机器人|曾嘲笑苹果的它,最终变成了曾经讨厌的模样,刘海加持
- 机器人|高端制造高歌猛进,中国要在机器人技术领域杀出一条血路!
- 汽车|工信部:2022年对应用商店、第三方软件开发工具包等实现监管全覆盖
- 机器人|四轴和六轴机器人的区别是什么,看了就知道!
- 软件|2021年企业协作行业盘点:打破外延,拥抱生态